
Artificial Intelligence Research
A.I. based Robot Control Project
We conduct AI-driven research for human–robot collaboration. Our work focuses on accurately interpreting human intent and leveraging the ROS-based Model Context Protocol (MCP) to enable robots to execute instructions generated by large language model (LLM). This framework allows exoskeleton robots to understand human needs and respond in real time, enabling more natural and effective collaboration.
Our Researches
2025
Multimodal Transformer-Based Human Intent Recognition Using Skeleton and RGB Data for HRI Applications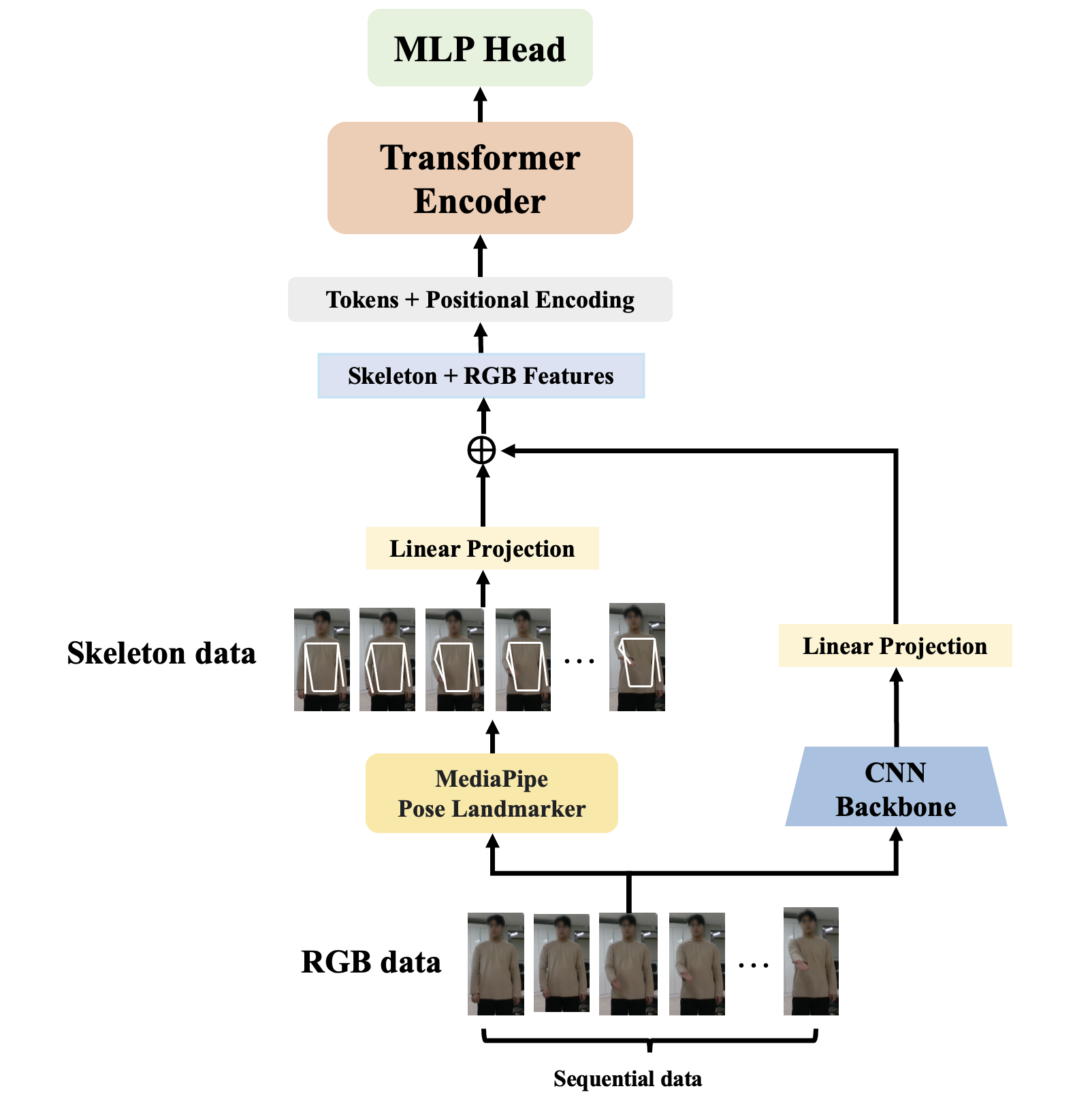 An Efficient Robot Control Framework Using the Model Context Protocol
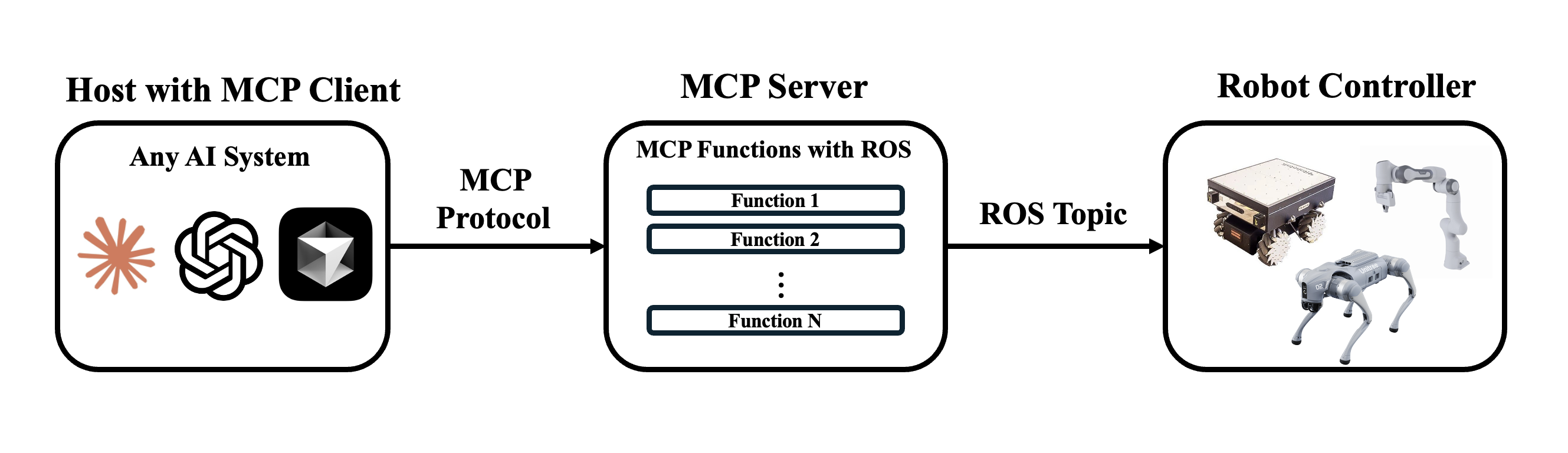
An Efficient Robot Control Framework Using the Model Context Protocol
2024
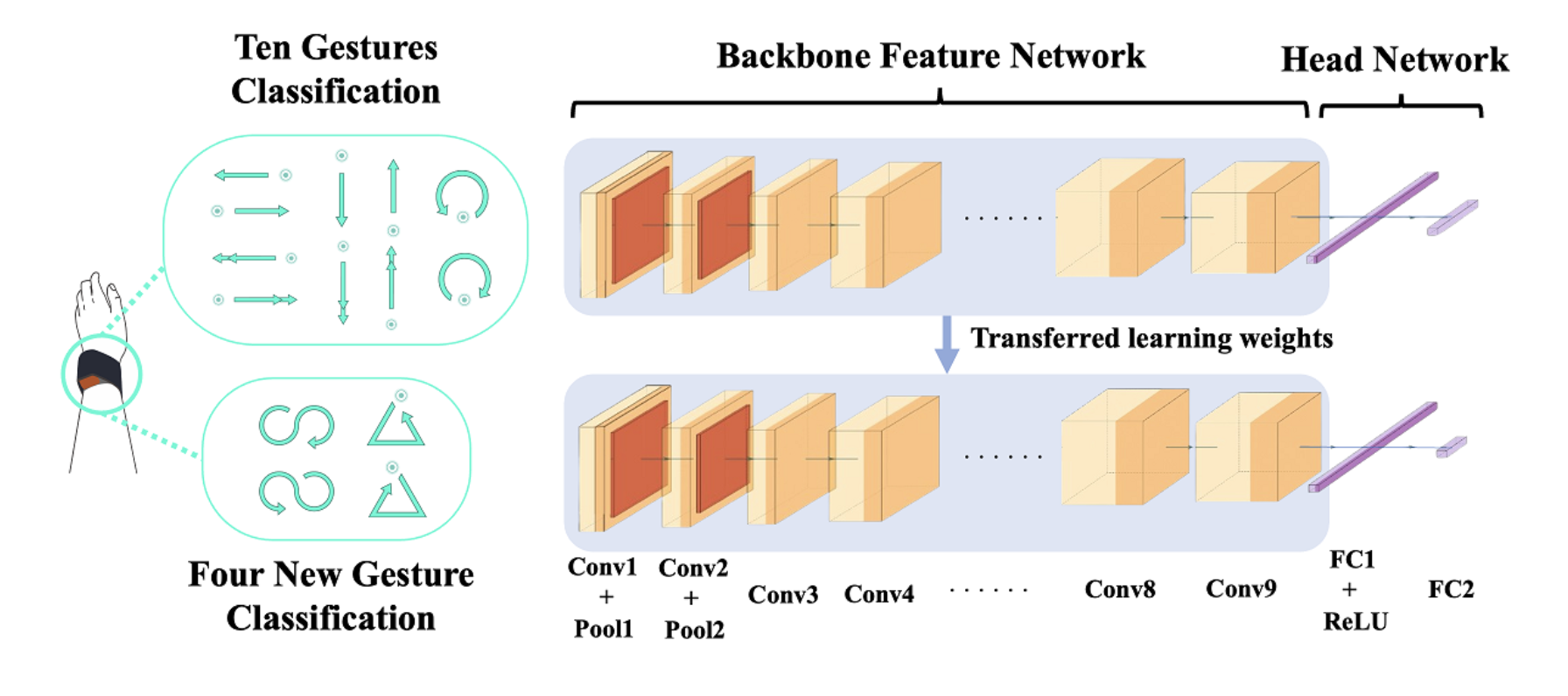
An Intuitive Framework to Minimize Cognitive Load in RoboticControl A Comparative Evaluation of Body Parts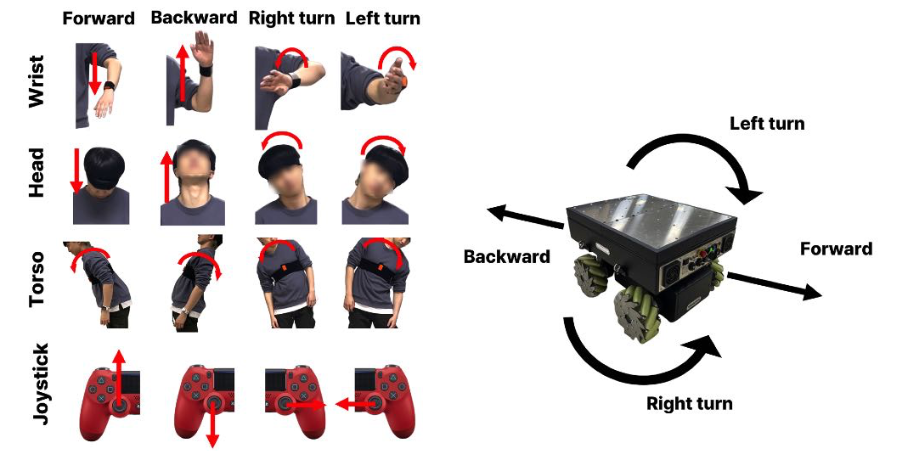 Transferable Convolutional Neural Networks for IMU-based Motion Gesture Recognition in Human-Machine Interaction
Transferable Convolutional Neural Networks for IMU-based Motion Gesture Recognition in Human-Machine Interaction
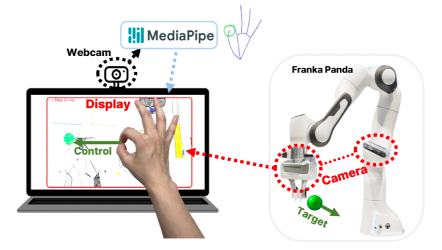
 Intuitive Robotic Arm Teleoperation Framework Utilizing Vision Based Real-Time Hand Sign Tracking
Intuitive Robotic Arm Teleoperation Framework Utilizing Vision Based Real-Time Hand Sign Tracking
related project
- Development of Solution Technology for Personalized Gait Control and Performance Evaluation of Lower-limb Robotic Exoskeleton through Artificial Intelligence/Big Data
- Development of Healthcare Service and Medical Robot using Artificial Intelligence