Intuitive Robotic Arm Teleoperation Framework Utilizing Vision Based Real-Time Hand Sign Tracking
Goal
The objective of this study is to propose a novel framework for intuitively controlling high degree-of-freedom robotic arms using vision-based hand sign tracking. ***
Summary
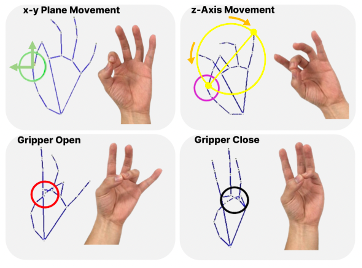
This study proposes a vision-based teleoperation framework that enables intuitive control of high degree-of-freedom robotic arms through real-time hand gesture tracking. By recognizing thumb-to-finger contacts, the system allows users to perform precise movements such as planar positioning, vertical motion, and gripper control. Comparative experiments with a traditional joystick showed that the proposed framework achieved faster task completion and higher success rates, highlighting its potential to enhance user accessibility and operational efficiency in robotic control.