Development of Solution Technology for Personalized Gait Control and Performance Evaluation of Lower-limb Robotic Exoskeleton through Artificial Intelligence/Big Data
2020-04-01 ~ 2023-12-31
Period : 2020-04-01 ~ 2023-12-31
Goal of This Project
- Implementation of Walking Big Data Construction Technology Using Motion Analysis System
- Development of robot control technology and artificial intelligence-based personalized walking parameter generation algorithm and walking diagnosis digital healthcare technology
- Establishment of exoskeleton robot system with walking integrated solution technology
Project Contents
User walking big data construction technology (SW) using motion analysis system
- Sensor fusion technology that integrates motion analysis systems (optical/non-optical motion analysis sensors, ground reaction force measurement sensors, bio-signals, etc.)
- Human body motion and walking analysis technology using integrated motion analysis system and terrain platform
- Data collection and data set construction technology using the Robot Operating System (ROS) environment
- A technique for classifying data from a wide range of human walks through indexing and analysis of collected data
Robot control technology and AI-based personalized walking parameter generation algorithm and walking diagnosis digital healthcare technology (SW)
- Technology for generating a model for predicting timing and auxiliary torque parameters to support user muscle optimization
- Synchronization gain prediction model of patient leg joint for optimal gait support
- PID/Impedance-Control technology for active motion control during walking
- Personalized control parameter extraction technology through the application of big data and artificial intelligence
- Performance factor modeling technology for determining personalized walking ability and amount of walking support
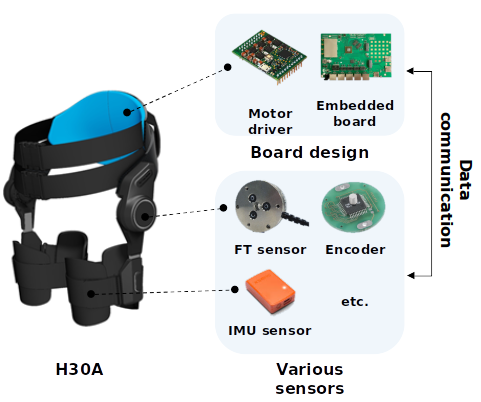
Exoskeleton Robot System with Walking Integrated Solution Technology (SYS)
- H30A Robot with Personalized Muscle Support Model Technology
- HKAFO robot with patient optimization Synchronization gain prediction model technology
- Data Interworking and Collection Technology of the System for Performance Analysis before and after Wearing Exoskeleton Robot
- Performance evaluation technology of walking support rate through comparative analysis before and after wearing a robot

Participating Researchers
- Wansoo Kim : Principal Investigator
- Seongmin Ha : (H/W) Electrical Part Design
- Joonhyun Kim : (S/W) AI Engineering, Optization, Data collection
- Joonhyung Kong : (H/W) Setting up experimental environments, building embedded systems
- Dongcheol Shin : (H/W) Setting up terrain and experimental environment equipment
Funding
