An Intuitive Framework to Minimize Cognitive Load in RoboticControl A Comparative Evaluation of Body Parts
Goal
The objective of this study is to propose an intuitive robot control framework that minimizes cognitive load by inferring user intent through a single IMU sensor, eliminating the need for complex sensor setups.
Summary
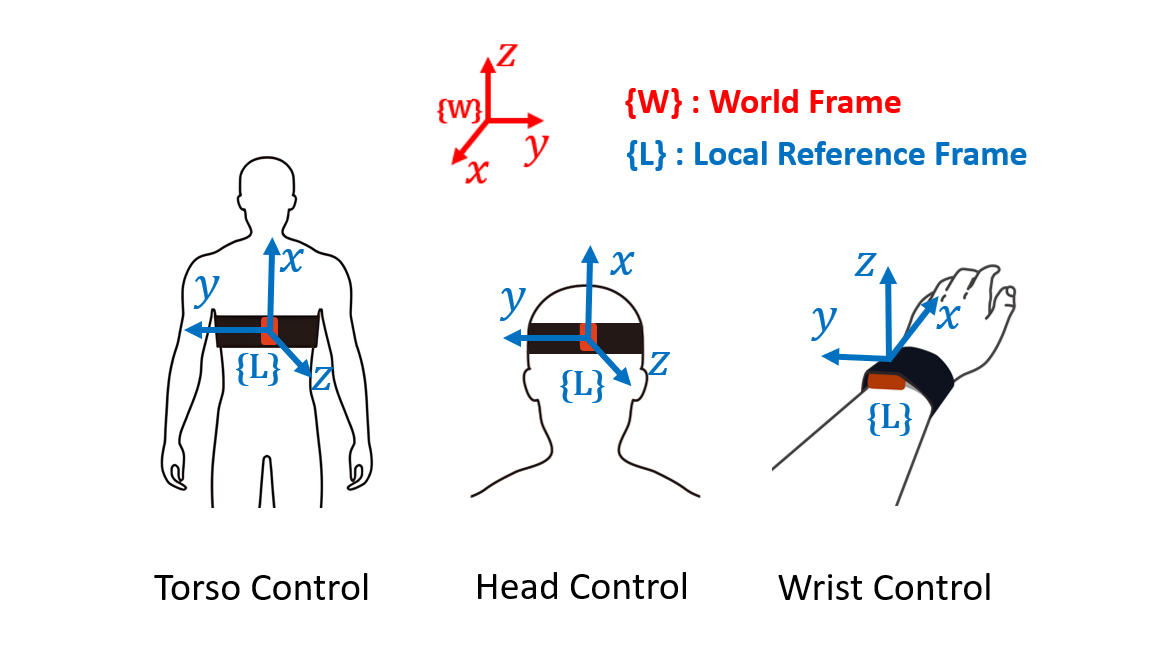
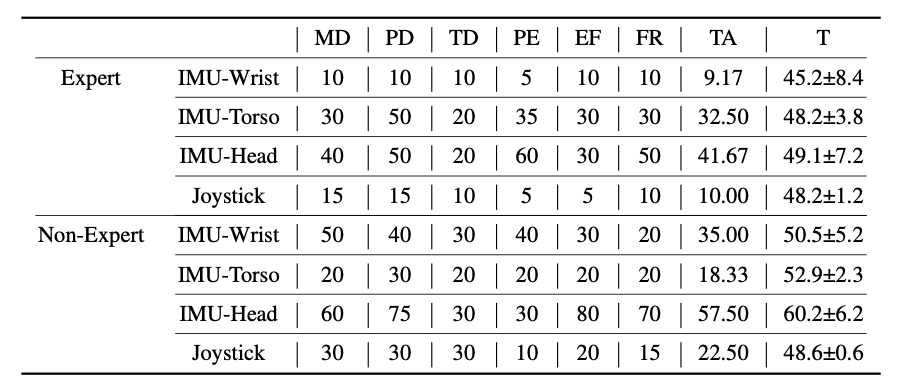
This study proposes an intuitive robot control framework aimed at minimizing cognitive load by using a single IMU sensor attached to specific body parts (wrist, torso, or head) to infer the user’s motion intent. By directly utilizing raw orientation data without requiring complex calibration or multi-sensor setups, the system enables real-time, natural robot control. A comparative evaluation shows that wrist-based control is preferred by expert users for its stability and performance, while torso-based control is favored by non-experts for its intuitiveness and ease of use. Both methods outperform traditional joystick control in usability due to their hands-free operation. The framework’s practicality is further supported by its compatibility with common smart devices, indicating strong potential for real-world applications in human-robot interaction.
Publication Link : 2024 21st International Conference on Ubiquitous Robots(UR)