
Exoskeleton Robot Research
Exoskeleton Control & Soft Exoskeleton
We study how to design and control exoskeletons that are both adaptive and lightweight. On the control side, we develop gait indices and ergonomic frameworks to adjust assistance across terrains while ensuring user safety. On the hardware side, we explore soft exosuit mechanisms, variable stiffness actuators, and hybrid gear systems to provide smooth torque transfer and improve energy efficiency. Together, these efforts aim to create wearable robots that combine flexibility, safety, and efficiency for effective human–robot collaboration.
Our Researches
2025
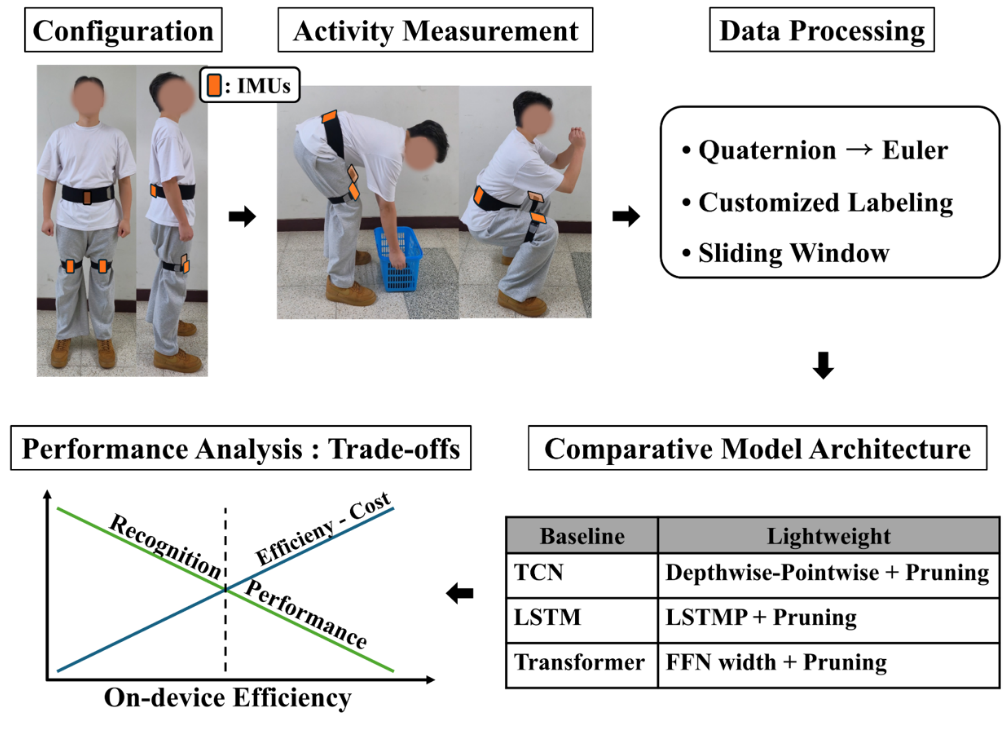
Proactive Ergonomic Human Motion Generation for Human-Robot Collaboration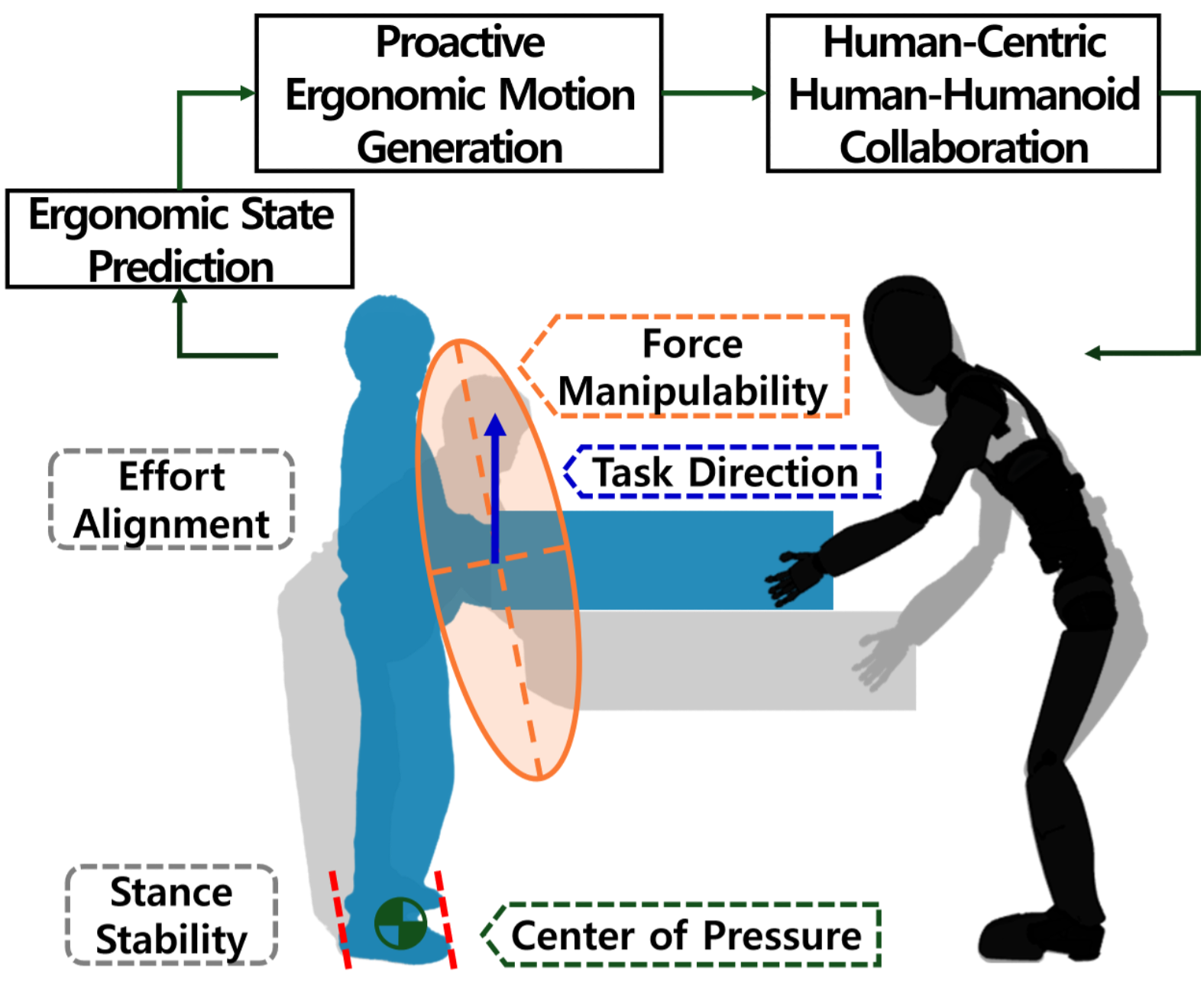 L_HAR : Lightweight Human Activity Recognition
L_HAR : Lightweight Human Activity Recognition
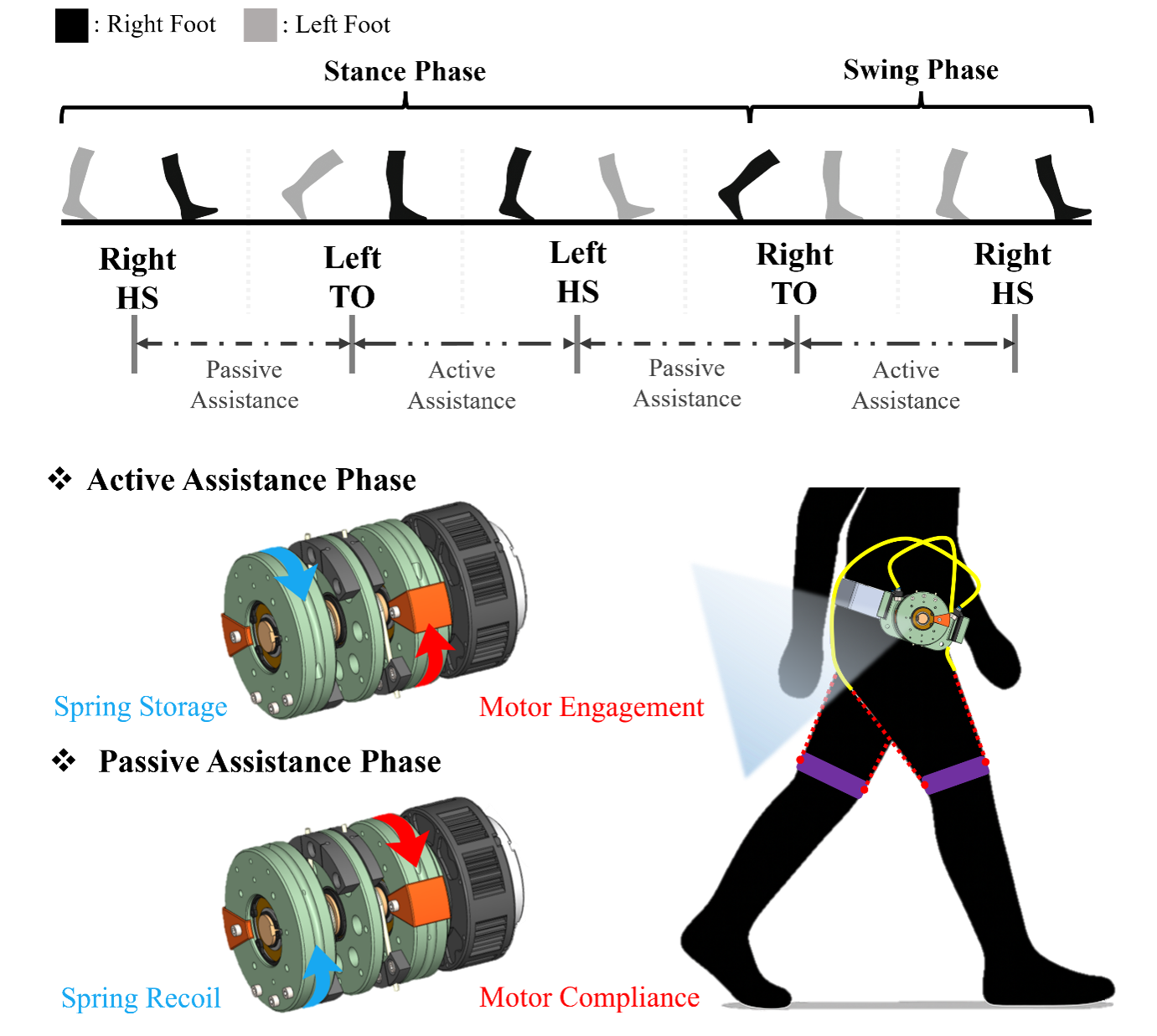
 Developing A Hybrid Bidirectional Pulley Module (HBPM) for Cable-Driven Soft Exosuits
Developing A Hybrid Bidirectional Pulley Module (HBPM) for Cable-Driven Soft Exosuits
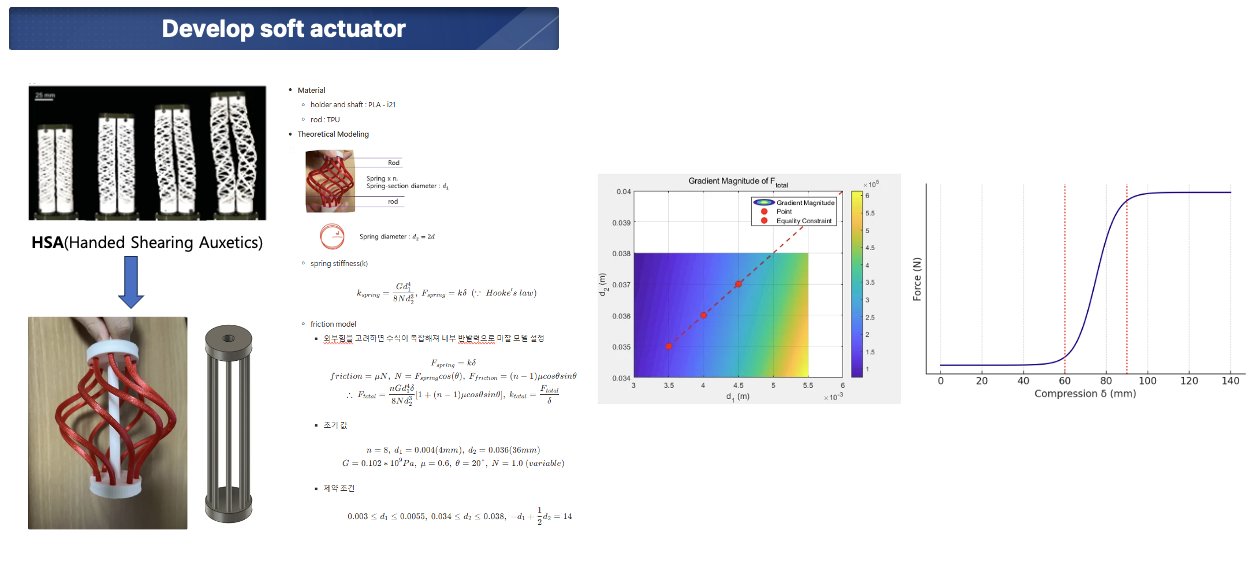
 Develop soft actuator
Develop soft actuator
 Soft Actuator with torsion
Soft Actuator with torsion
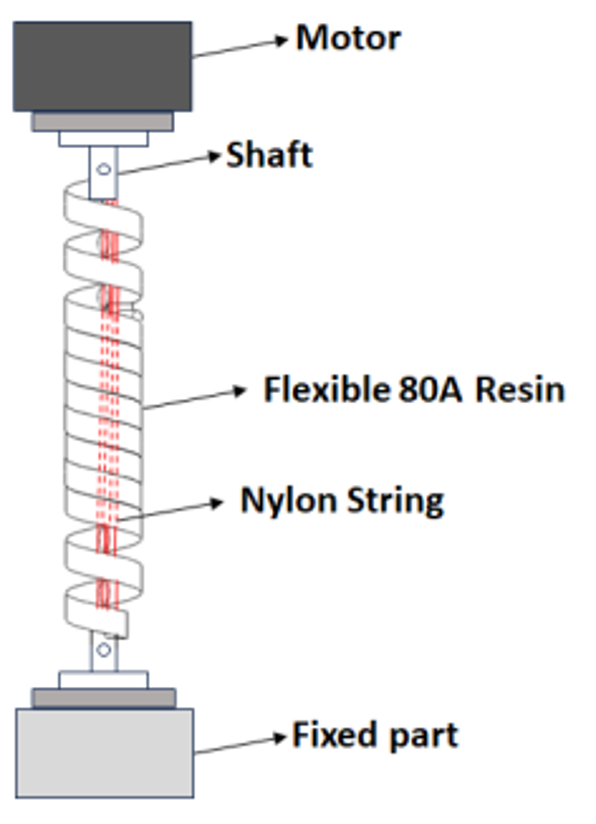
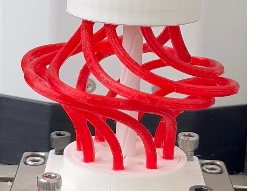 Soft Exo: TSA-Silicone Hybrid with Adjustable Stfiffness
Soft Exo: TSA-Silicone Hybrid with Adjustable Stfiffness
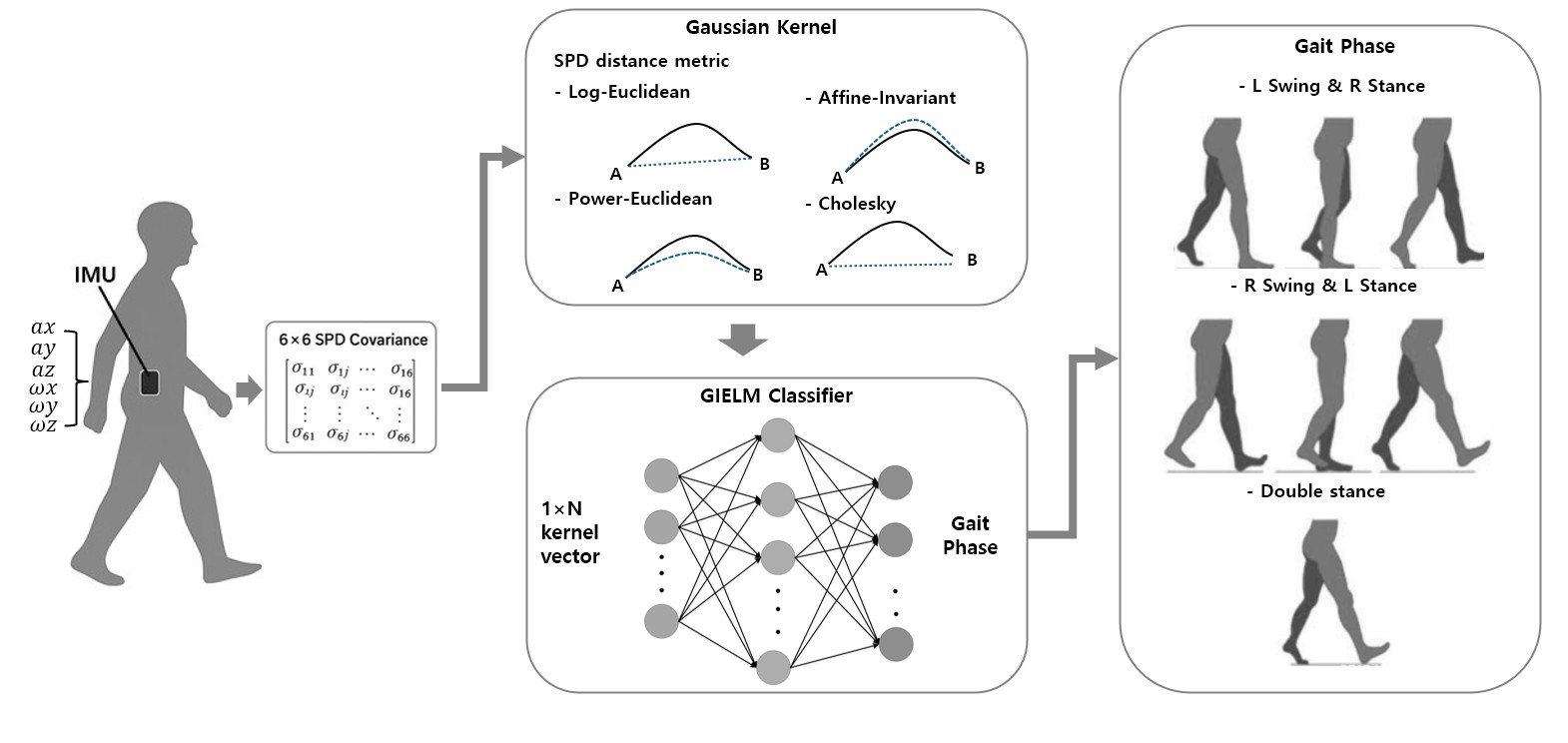
 Pelvic IMU-Based Gait Phase Classification using Kernel-Embedded Extreme Learning Machine
Pelvic IMU-Based Gait Phase Classification using Kernel-Embedded Extreme Learning Machine
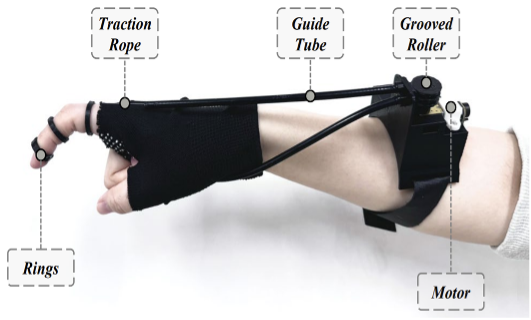
 Design of rope-driven hand exoskeleton
Design of rope-driven hand exoskeleton
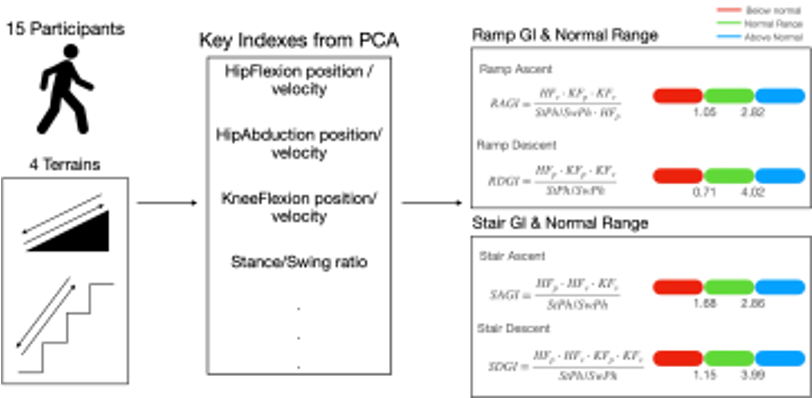
 Development of a Terrain-Specific Modified Gait Index Using the AnyBody Modeling System
Development of a Terrain-Specific Modified Gait Index Using the AnyBody Modeling System
2023
Twisted String Actuator(TSA) with extended variable stiffness Multitask Learning for Multiple Recognition Tasks in Lower-limb Exoskeleton robot
Multitask Learning for Multiple Recognition Tasks in Lower-limb Exoskeleton robot
 Active Passive Hybrid Joint System Using Planetary Gears
Active Passive Hybrid Joint System Using Planetary Gears
 Design and Validation of Soft Sliding Actuator
Design and Validation of Soft Sliding Actuator
