Mobile Manipulator Research
Mobile Manipulator Project
In our lab, research on mobile manipulators is being conducted in various ways under the theme of Human-Robot Interaction (HRI). Working with mobile manipulator robots and workers can make it easier to perform tasks, or they can do certain tasks on behalf of people.
Our Researches
Stable Variable Impedance Control via CLF-MPC for Physical Human-Robot Interaction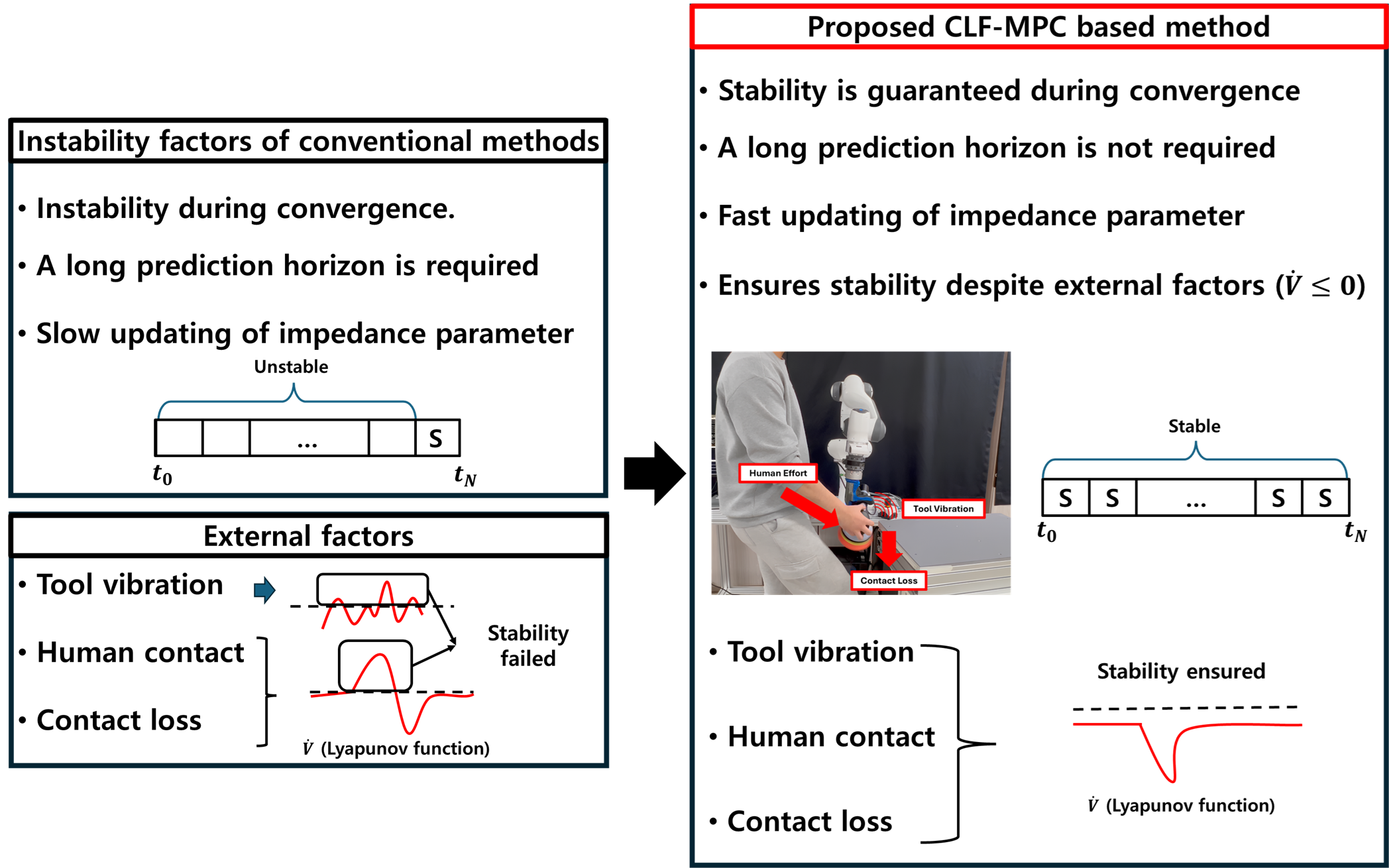 Nonlinear Optimization-Based Real-Time Trajectory Planning for Cooperative Transport of Heterogeneous Mobile Manipulators
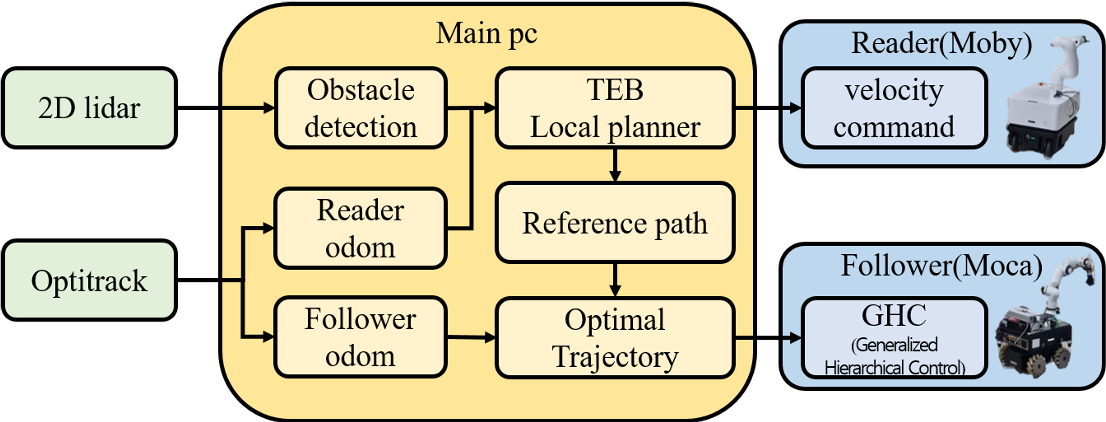
Nonlinear Optimization-Based Real-Time Trajectory Planning for Cooperative Transport of Heterogeneous Mobile Manipulators
 Human-Centered Adaptive Intent Driving Approach for Mobile Manipulators
Human-Centered Adaptive Intent Driving Approach for Mobile Manipulators
 Real-Time Classification of Intentional and Unintentional Physical Contacts Using Joint Torque Patterns in Robot Manipulation
Real-Time Classification of Intentional and Unintentional Physical Contacts Using Joint Torque Patterns in Robot Manipulation
 Adaptive Control for Human-Robot Collaboration
Adaptive Control for Human-Robot Collaboration
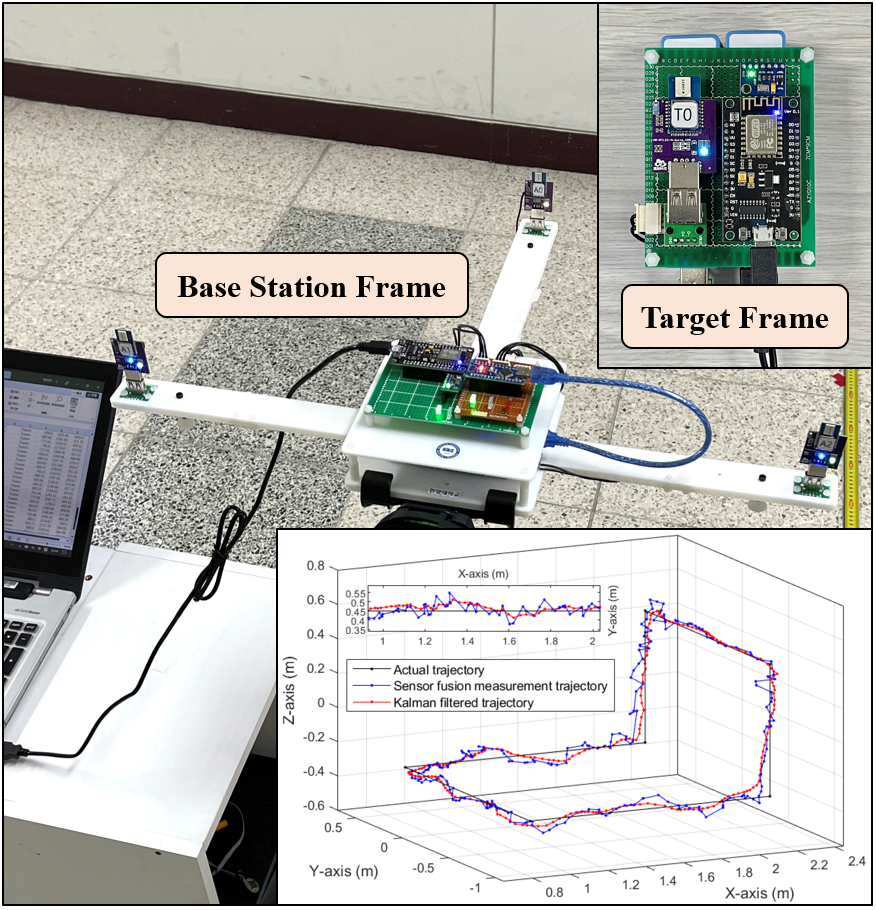
 Target tracking mobile robot
Target tracking mobile robot