Collision-Free Target Grasping Motion Planning
Joosun Lee
November 12, 2022
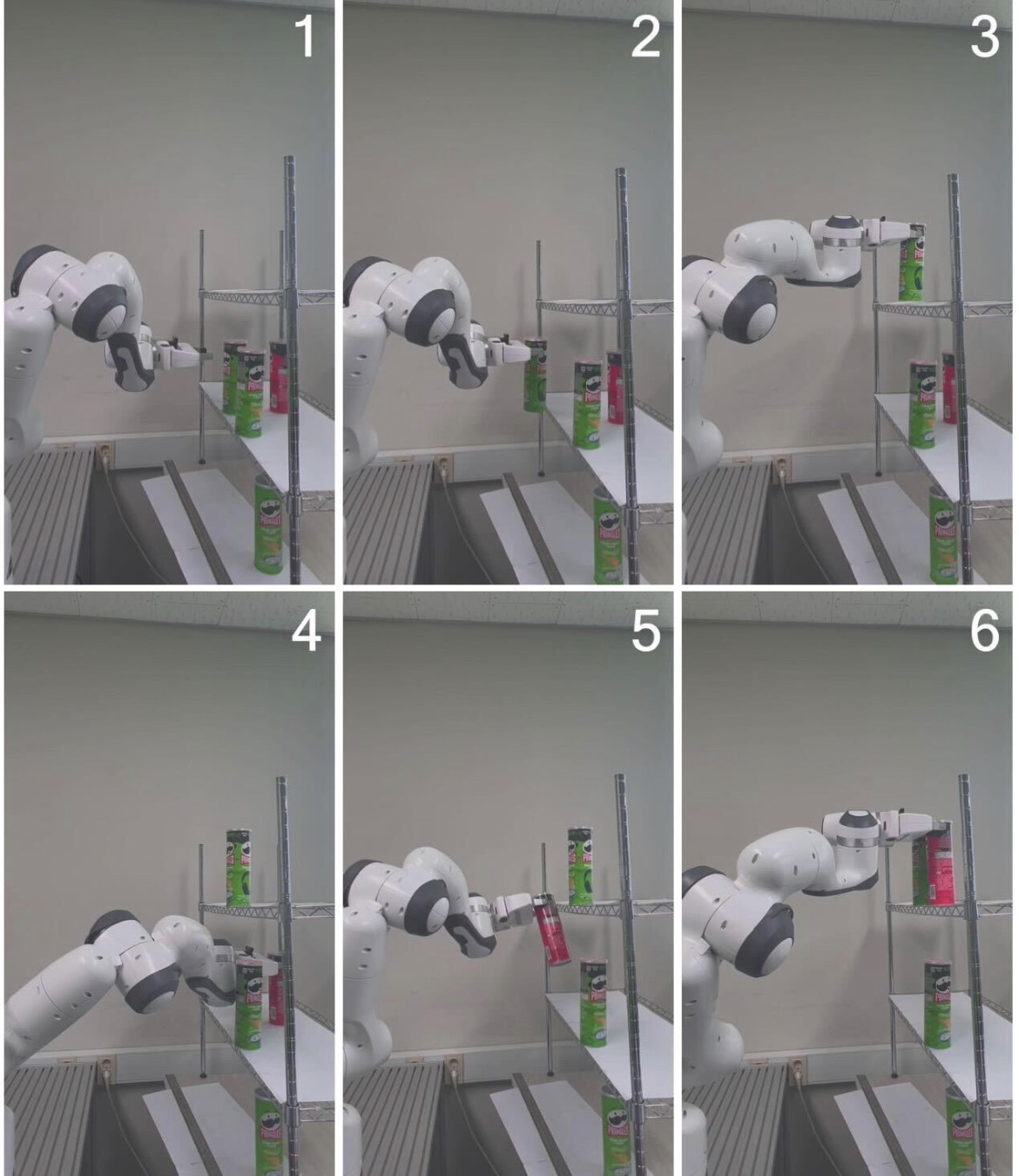
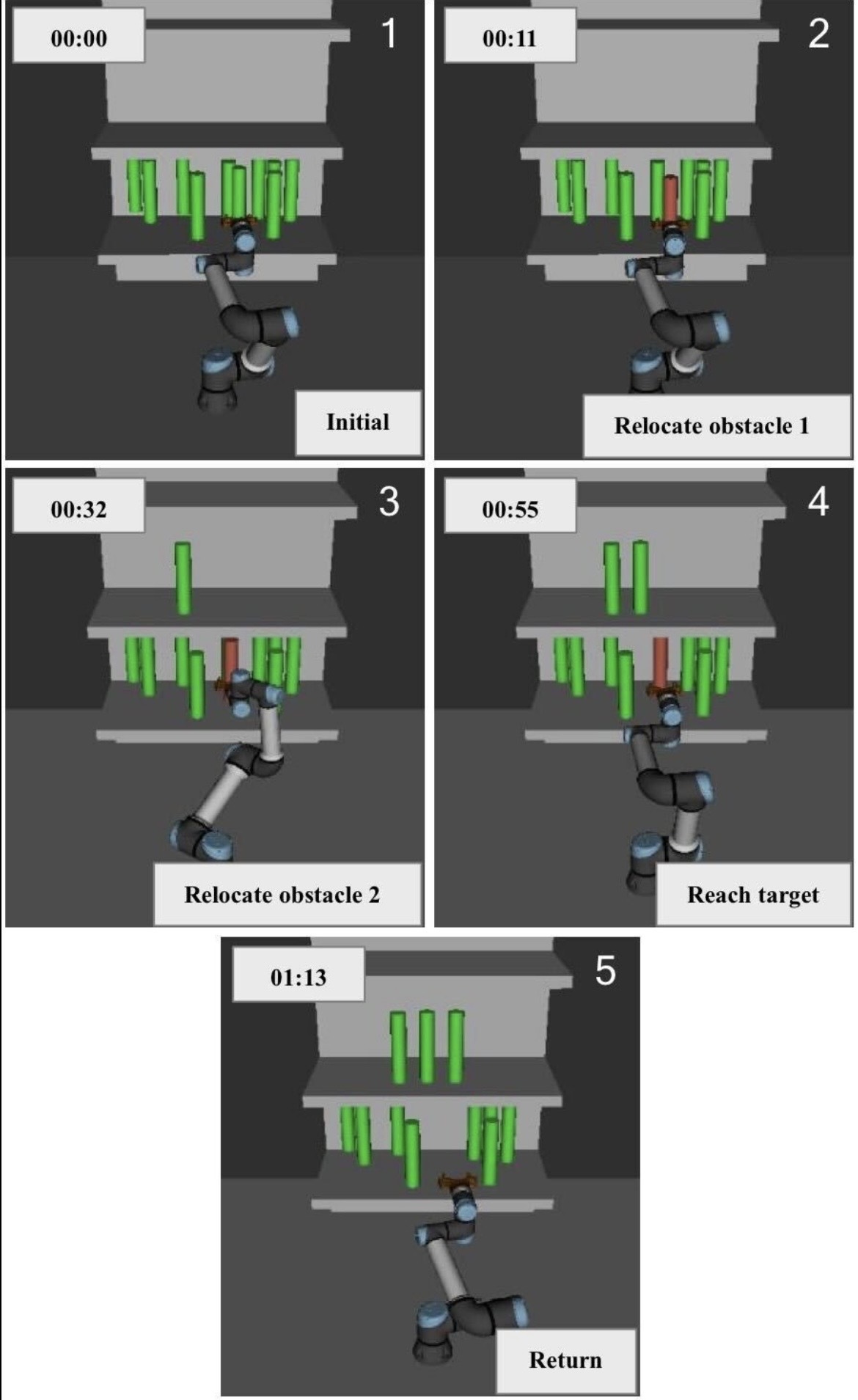
Goal : Collision-Free Target Grasping in Complex and Cluttered Environment for Efficient Task and Motion Planning
Summary The robot updates the path through the RRT algorithm in every step while moving toward the target as removing the obstacle or avoiding it.
Topic
- Motion Planning
- TAMP