Participated in the ICCAS 2025 in Incheon
Members of the HARCO Lab participated in the International Conference on Control, Automation, and Systems (ICCAS), held in Incheon, Korea.
During the conference, Seongmin Ha presented the paper:
"Pelvic IMU-Based Gait Phase Classification Using Kernel-Embedded ELM: A Preliminary Validation Framework for Future Hemiplegic Gait Applications"
This work introduced a kernel-embedded extreme learning framework leveraging pelvic IMU data to robustly estimate gait phases, forming the groundwork for future personalized hemiplegic gait assistance.
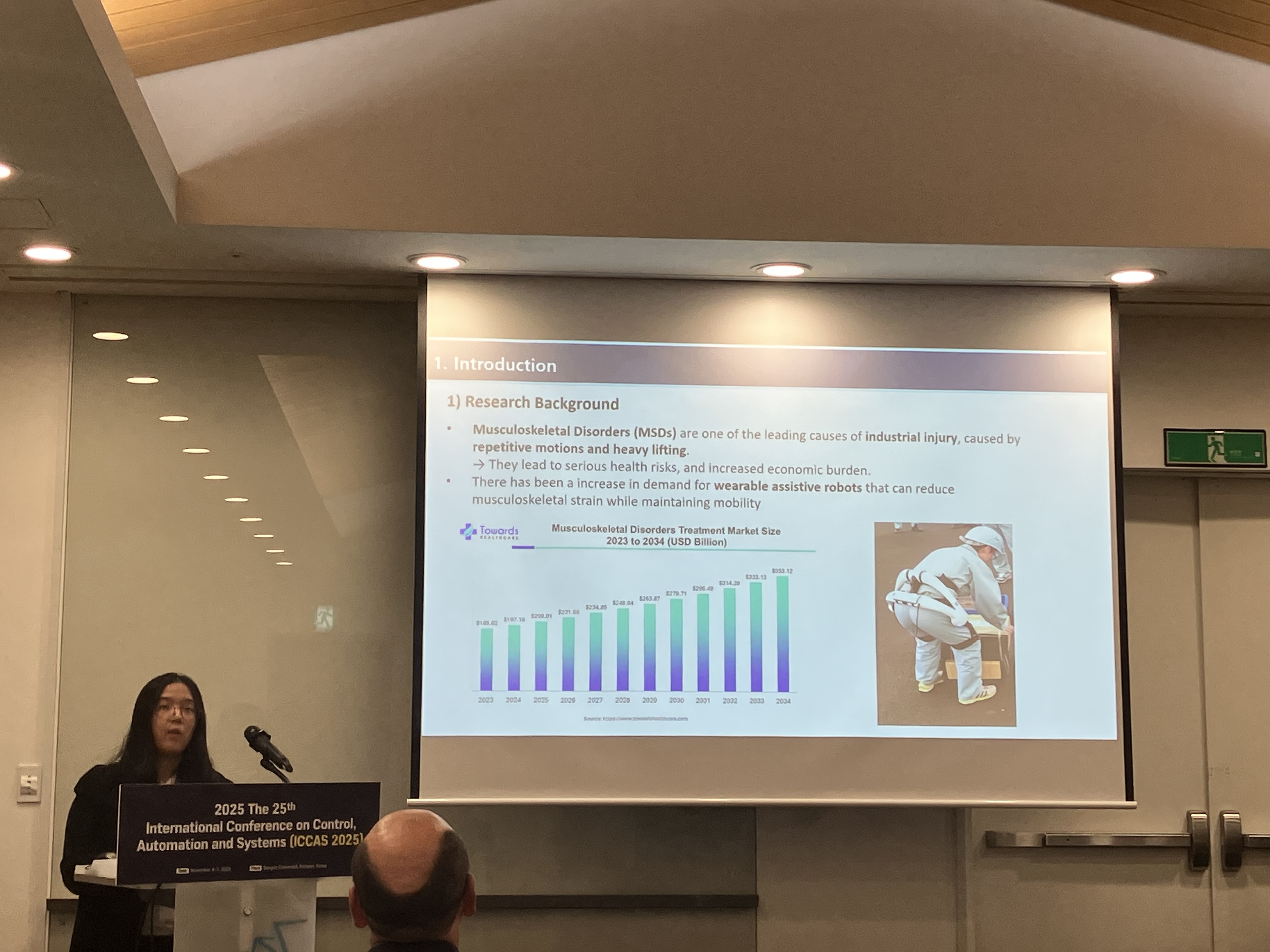
In addition, Miseon Jo delivered an invited workshop talk titled:
"Beyond Softness: A Multi-DoF Soft Actuator with TSA-Based Layer Jamming for Wearable Robotics"
Her presentation introduced a novel multi-DoF soft actuation mechanism integrating tendon-driven and layer-jamming concepts, enabling safer and more adaptive interactions for wearable robotic systems.