Soft Exo: TSA-Silicone Hybrid with Adjustable Stfiffness
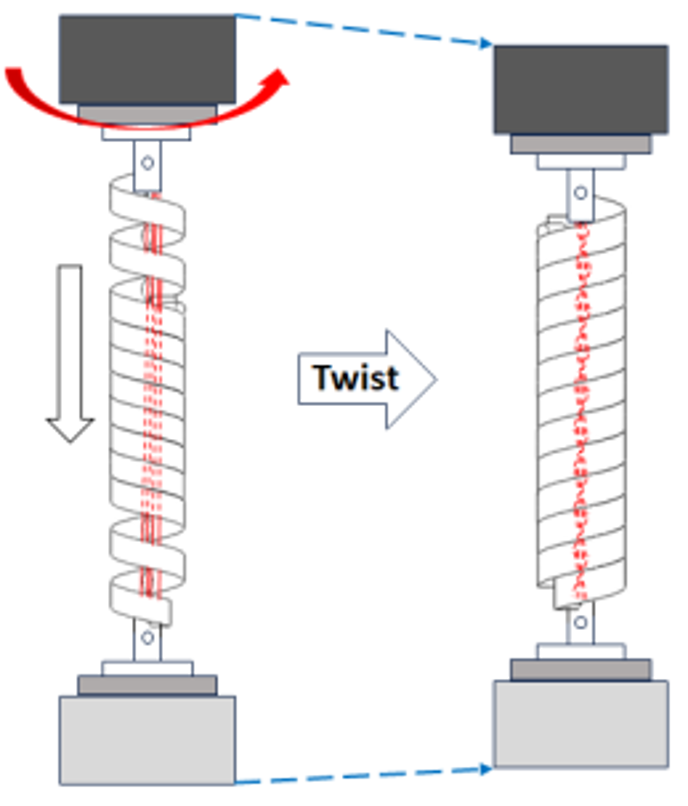
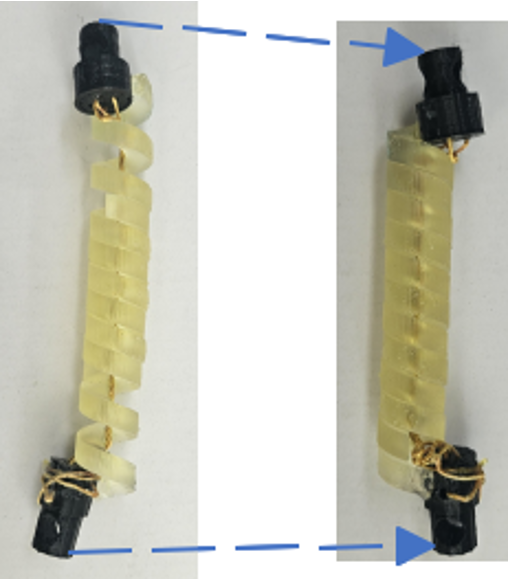
Goal : This study aims to develop a novel soft actuator that combines a Twisted String Actuator (TSA) with a spiral layer jamming mechanism to achieve both tunable stiffness and multi-degree-of-freedom (DoF) motion capabilities, specifically designed for wearable back-support applications. Unlike conventional jamming mechanisms that rely on bulky pneumatic systems, the proposed actuator employs a motor-driven TSA to simultaneously induce axial contraction and rotational jamming of helically arranged flexible layers. This approach enables directional stiffness modulation across bending and axial axes through a compact, lightweight, and self-contained structure. To quantitatively characterize this hybrid mechanism, the study formulates analytical models for both bending and axial stiffness based on beam theory and TSA dynamics, and experimentally validates the actuator’s performance across multiple stiffness states. Ultimately, the goal is to demonstrate a feasible, scalable, and pneumatic-free actuation strategy that enhances the adaptability and functional range of soft wearable robots engaged in complex multi-directional human movement.
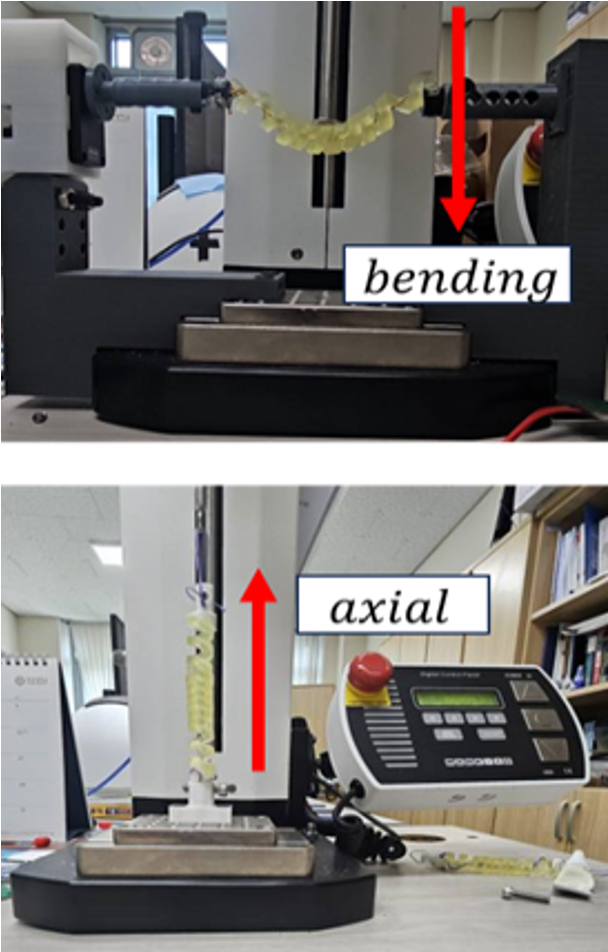
Summary As the demand for wearable assistive devices increases, the need for soft actuators capable of adaptive and directional stiffness control has grown. This paper presents a novel soft actuator that combines a twisted string actuator (TSA) with a spiral layer jamming mechanism to enable multi-degree-of-freedom (DOF) motion with tunable stiffness. Unlike conventional jamming mechanisms that rely on pneumatic components, the proposed mechanism achieves stepwise stiffness modulation through motor-driven rotation alone, eliminating the need for pneumatic components. Analytical models were developed to predict stiffness changes in both axial and bending directions and were validated experimentally using flexible materials. The results confirm that jamming significantly enhances stiffness. Bending stiffness increased by up to 40.9% across jamming steps and by up to 48.5% compared to the silicone-only design. Axial stiffness showed up to 56.0% improvement between steps and up to 66.8% over the baseline. The proposed design offers a lightweight and compact solution suitable for integration into wearable robotic systems, particularly for back-support applications requiring adaptable and compliant actuation.