
Hyundai Mobis Mobile Manipulator Whole Body Control
2022-08-01 ~ 2024-04-30
Period : 2022-08-01 ~ 2024-04-30
Goal of This Project
- Development the of Whole Body Mobile Manipulator Control Algorithm
Project Contents
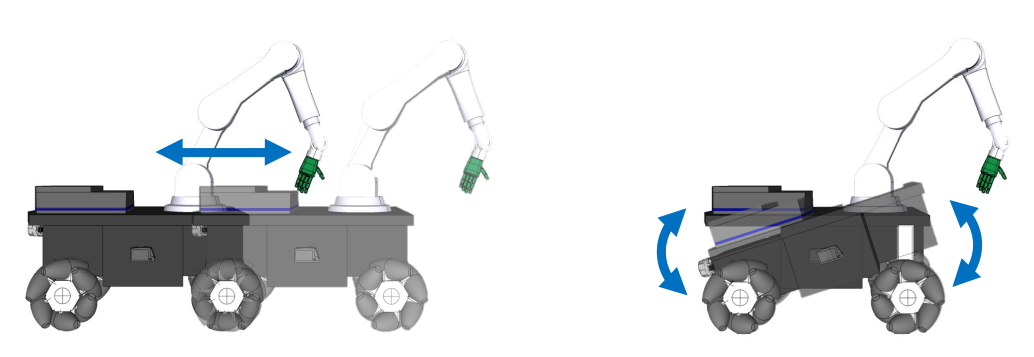
Whole-body control of mobile manipulator for dynamic stability implementation
- Corner module-based mobile manipulator (manipulator 6 degrees of freedom , mobile 12 degrees of freedom)
- hole body optimal control framework using the redundancy of mobile manipulator to perform multitasks
- Control to mitigate impact in case of contact with environment
Task configuration techniques for implementing Environment adaptability
- Task priority determination algorithms that change the robot’s task priorities according to human willingness to work or changes in the environment
demo Scenario
 Reliable transport of loaded or gripped objects, even in unstructured terrain (e.g., slope, fine ground, etc.). Also, avoid collisions with the environment during transport and generate motion to stably transport objects in the event of a collision.")
 If the mobile robot cannot access the target due to the surrounding environment, the system is stabilized by Whole Body control using the robot's Redundancy while grasping the target.")
Participating Researchers
- Wansoo Kim : Principal Investigator
- Joonkyu No : (S/W) Mobile Robot Control
- Jaepil Jang : (S/W) Whole Body Control, Task Planning
- Seungmin Choi : (S/W) Whole Body Control, Task Planning
Funding
