
HARCO Lab Widely Active at KRoC 2026: From Core Tech to Human-Centric Vision
Members of HARCO Lab actively participated in The 21st Korea Robotics Society Annual Conference (KRoC 2026), held from February 4th to 7th at the Alpensia Convention Center in Pyeongchang.

This year, our lab demonstrated comprehensive research capabilities spanning core robotic control technologies to advanced human-robot collaboration scenarios. Our contributions included an invited talk on the future of collaborative robots, a practical tutorial on integrating LLMs with ROS, specialized poster presentations, and interactive robot demonstrations.
Keynote & Tutorial
■ Invited Talk: Human-Centered Collaborative Robots

On February 6th, Prof. Wansoo Kim delivered an insightful invited talk titled “Human-Centered Collaborative Robots: Toward Safe and Adaptive Interaction”. Addressing the core tenets of the Industry 5.0 era, he presented engineering approaches designed to augment and support human workers.
The lecture focused on integrating technologies across key pillars:
- Human State Quantification: Utilizing wearable devices and mobile collaborative platforms to evaluate biomechanical states and workload.
- Shared Autonomy: Developing control strategies that adapt to human intent and motion changes using both model-based and learning-based methods.
- Physical AI: Applying Physical AI-driven approaches to seamlessly combine human state estimation with real-time control decision-making.
■ Tutorial: Bridging LLMs and ROS Robots with ROS-MCP
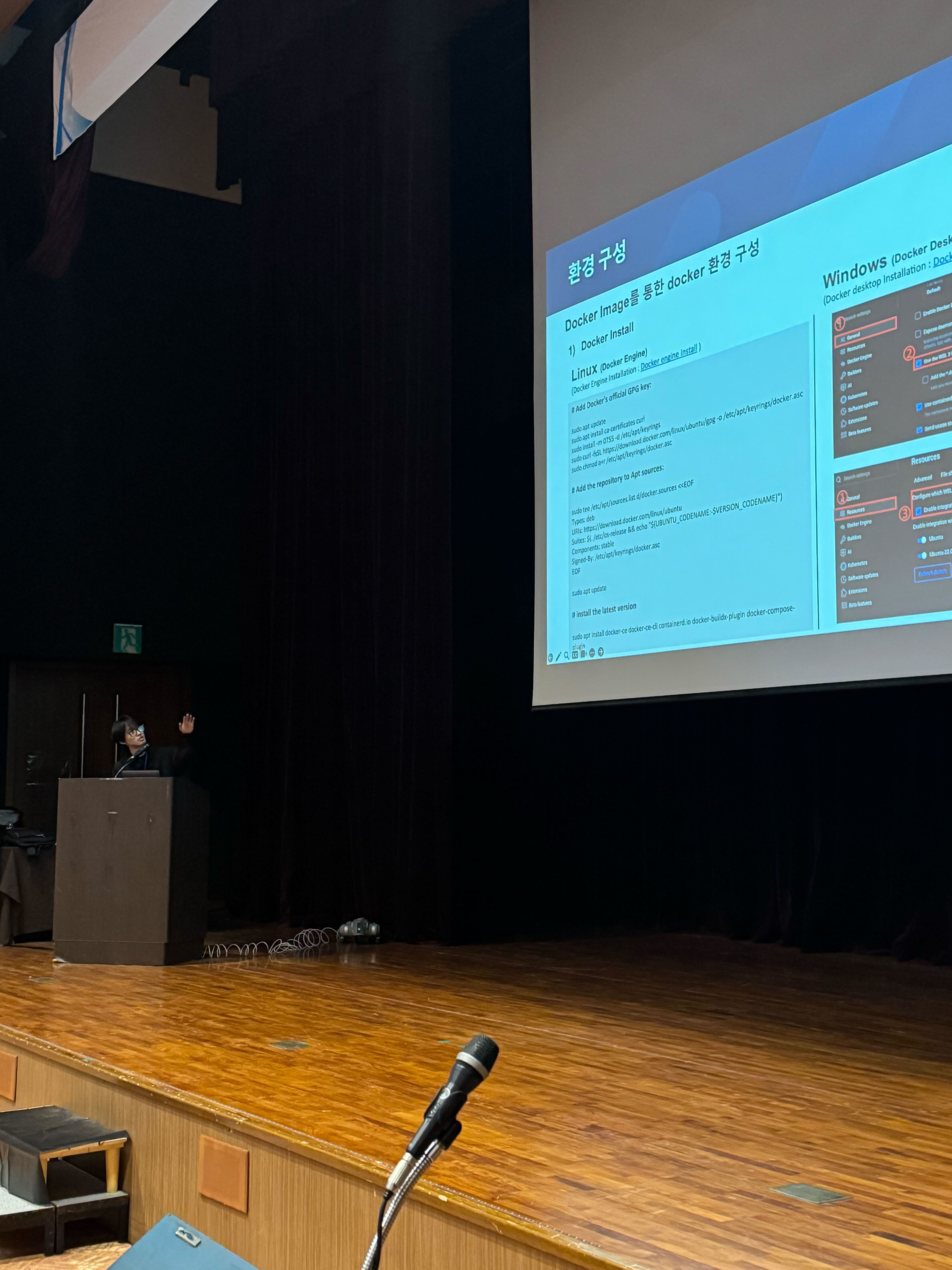
Our lab conducted a highly popular tutorial titled “ROS-MCP: Connecting LLMs with ROS Robots”. Led by Jeongsoo Lee and Jaegyun Park, the session introduced the Model Context Protocol (MCP), an open protocol designed to simplify the complex interface between Large Language Models (LLMs) and external robot systems.
The tutorial was praised for significantly lowering the entry barrier for HRI research by:
- Explaining the architecture of ROS-MCP.
- Providing hands-on experience controlling a mobile robot in Gazebo using an LLM.
- Sharing all resources via the open-source ROS-MCP GitHub repository.
Specialized Sessions & Demonstrations
■ Poster Presentations: Core Control & Teleoperation
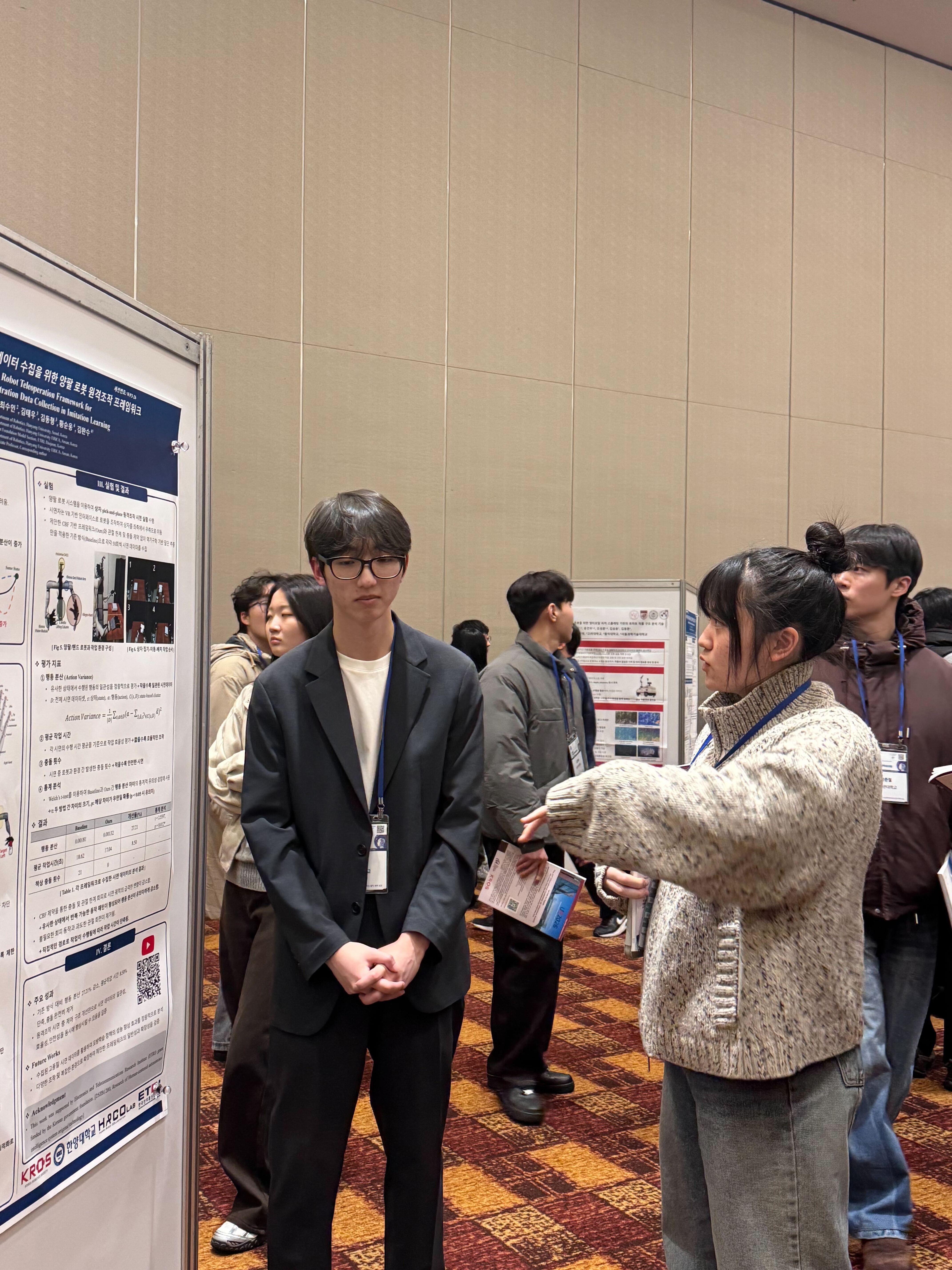
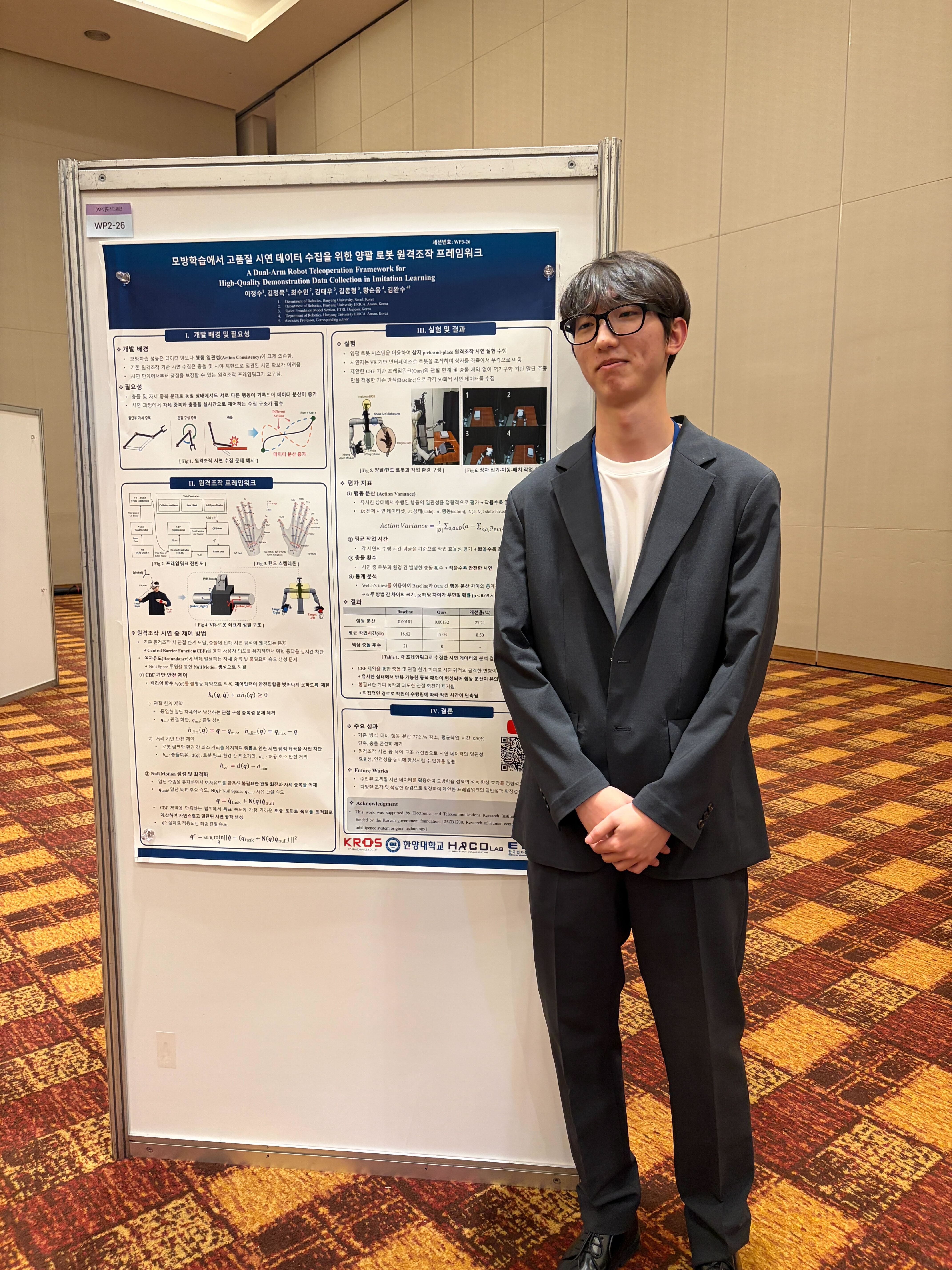
In the poster sessions, Jeongmok Kim presented “A Dual-Arm Robot Teleoperation Framework for High-Quality Demonstration Data Collection in Imitation Learning,” showcasing efficient methods for acquiring training data.

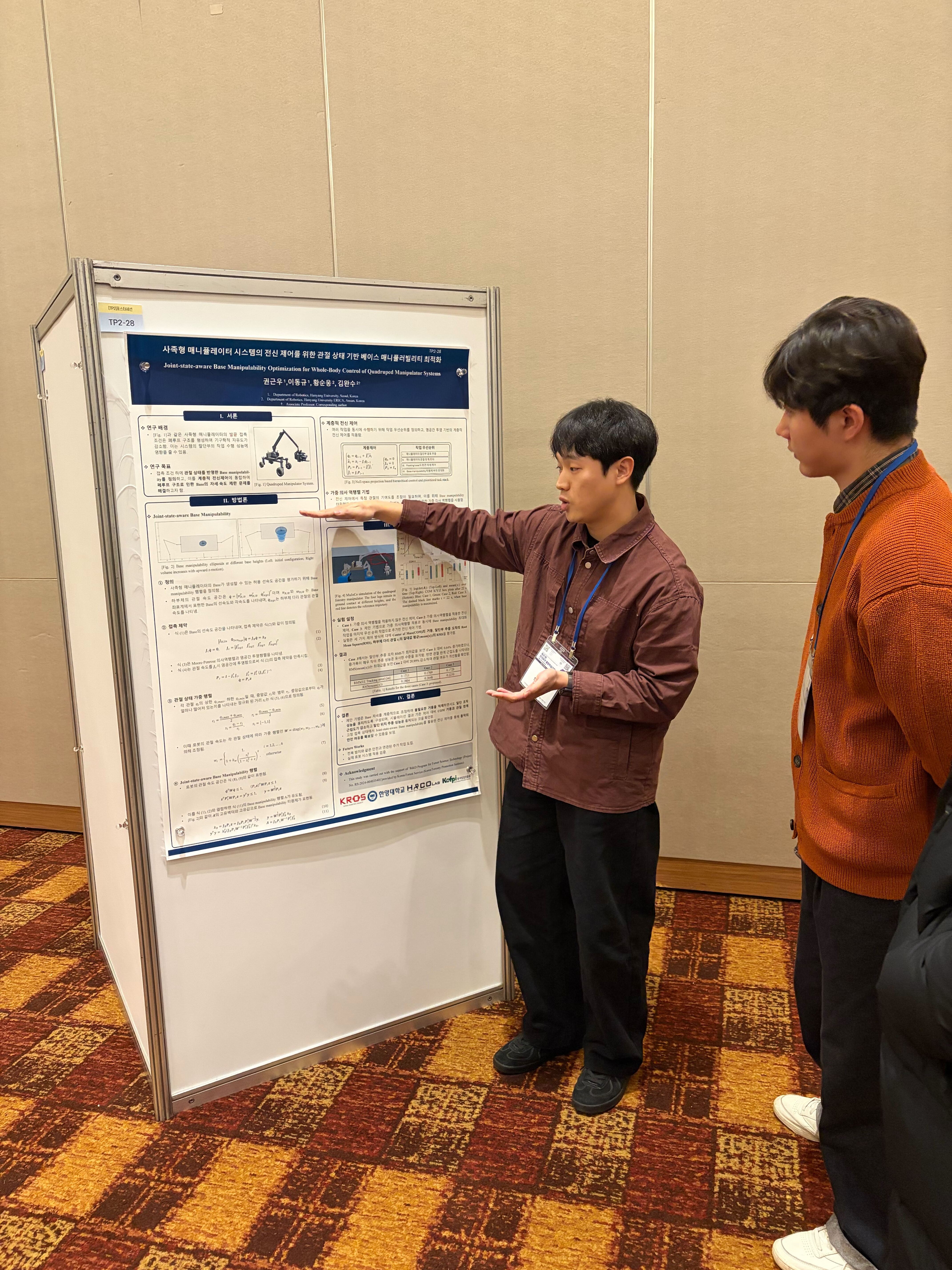
Geunwoo Kwon presented research on “Joint-state-aware Base Manipulability Optimization for Whole-body Control of Quadruped Manipulator Systems,” focusing on mobility and manipulation optimization for mobile platforms.
■ RED Show: Interactive Wearable Tech

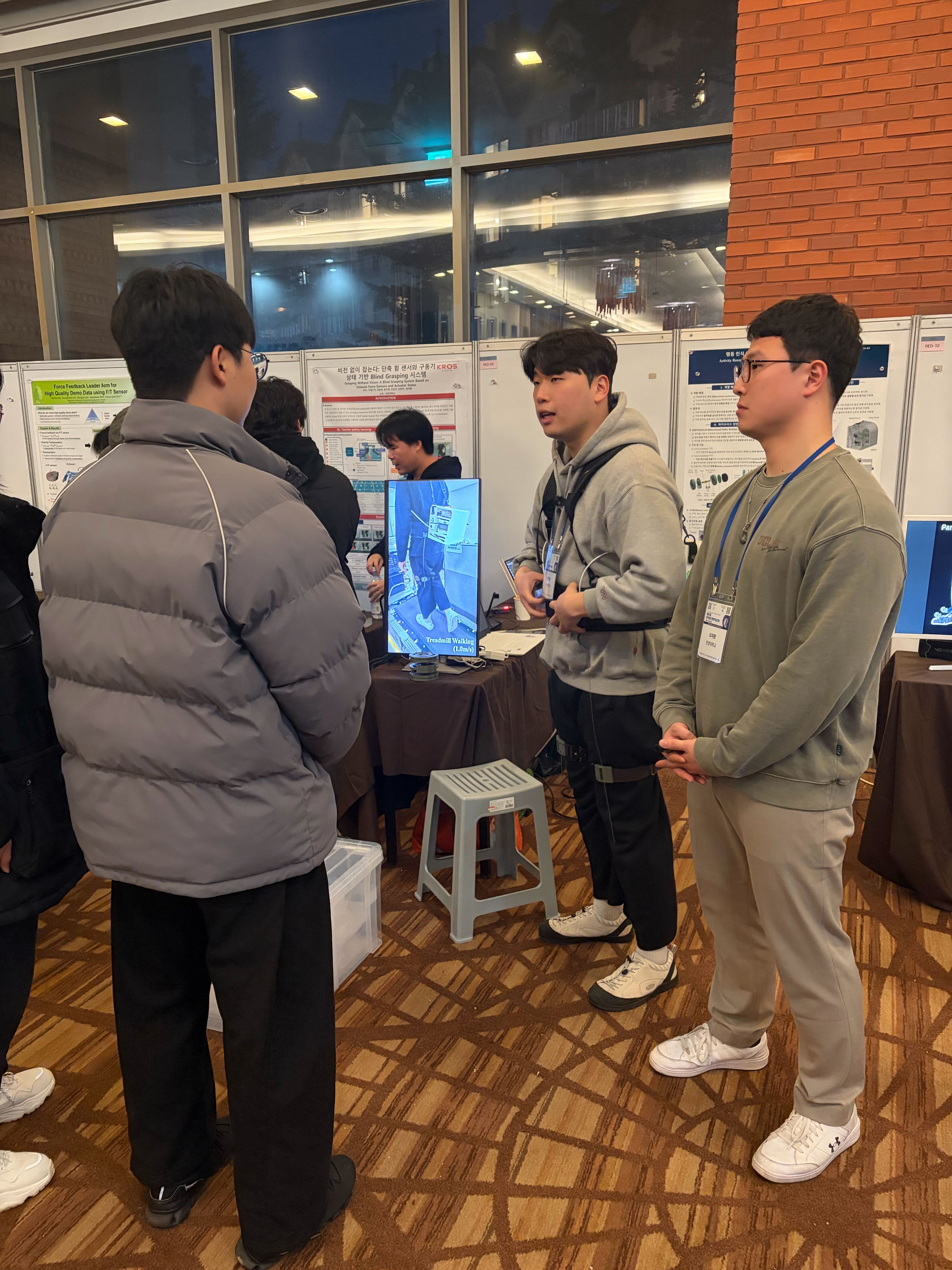
Jihwan Oh and Inho Gil participated in the RED Show, a dynamic robot demonstration competition. They showcased our lab’s advanced wearable and collaborative robotic systems, engaging directly with attendees through live, interactive demonstrations.
We are extremely proud of our members’ diverse and impactful contributions to KRoC 2026, further establishing HARCO Lab’s leadership in advancing functional human-robot harmony.