Design of rope-driven hand exoskeleton
Goal : To develop a lightweight, tendon-driven hand exoskeleton that enhances grasping assistance and rehabilitation by incorporating a dual-safety mechanism and intuitive two-handed synergistic control, ensuring both user safety and operational comfort.
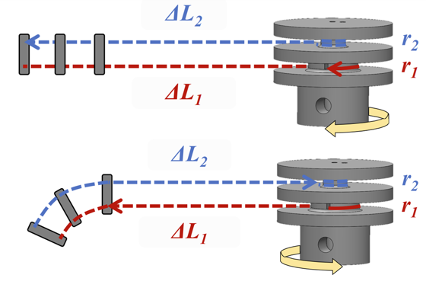
Summary My research presents a lightweight tendon-driven hand exoskeleton designed for grasping assistance and rehabilitation. It is characterized by the design of a double- grooved roller that can be used in a rope-driven device and fits most human finger sizes. As well as a dual safety mechanism using pressure and motor angle feedback, and a bimanual control strategy where left hand movements trigger right hand movements. Adaptive and safe grasping can be realized based on the PD force control algorithm. It is experimentally demonstrated that the method can reduce muscle loading and have high task grasping performance.