Developing A Hybrid Bidirectional Pulley Module (HBPM) for Cable-Driven Soft Exosuits
Goal : Design and implementation of a single actuator based HBPM that suppresses slack in Bowden cable transmission and provides stable bidirectional torque assistance for wearable robotics.
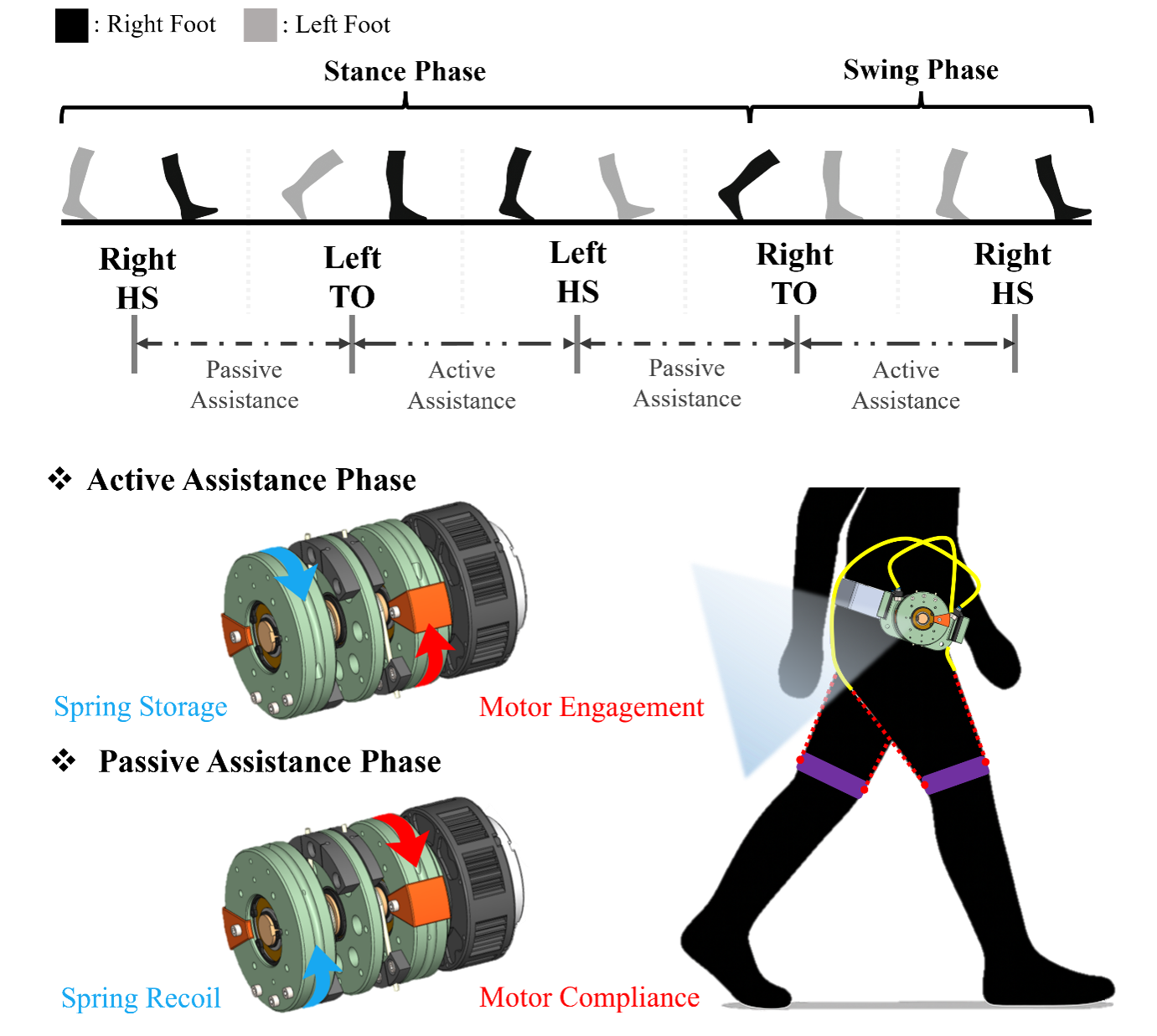
Summary Soft exosuits have emerged as lightweight and flexible alternatives to rigid exoskeletons, but their performance is constrained by the limitations of cable driven transmissions. Slack, friction, and hysteresis degrade torque fidelity, increase energy consumption, and often introduce discontinuities during motion reversals. These drawbacks reduce both the efficiency and stability of human assistance. To address these challenges, we are developing a Hybrid Bidirectional Pulley Module (HBPM) that integrates a single actuator, Bowden cable transmission, torsion springs in flipped configuration, and one-way clutches into a compact mechanism. The HBPM is designed to maintain continuous pretension, suppressing slack and enabling smooth torque transfer, while the torsional springs storage and release elastic energy to support bidirectional assistance. While the current work focuses on module design and dummy load testing, the long-term objective is to integrate this mechanism into wearable robotic platforms. Future studies will extend evaluation to human in the loop experiments to quantify both mechanical benefits and user comfort.